
Desde hacia tiempo estaba detras de unos diseños Open Source con los que se pudieran hacer fácilmente brazos robóticos. Tras conocer el Y1 de Obijuan (www.iaerobotics.com), me decidí a hacer unos módulos derivados de este por el cual se pudieran hacer cualquier tipo de robots, incluidos brazos.

 Montaje de un Y1
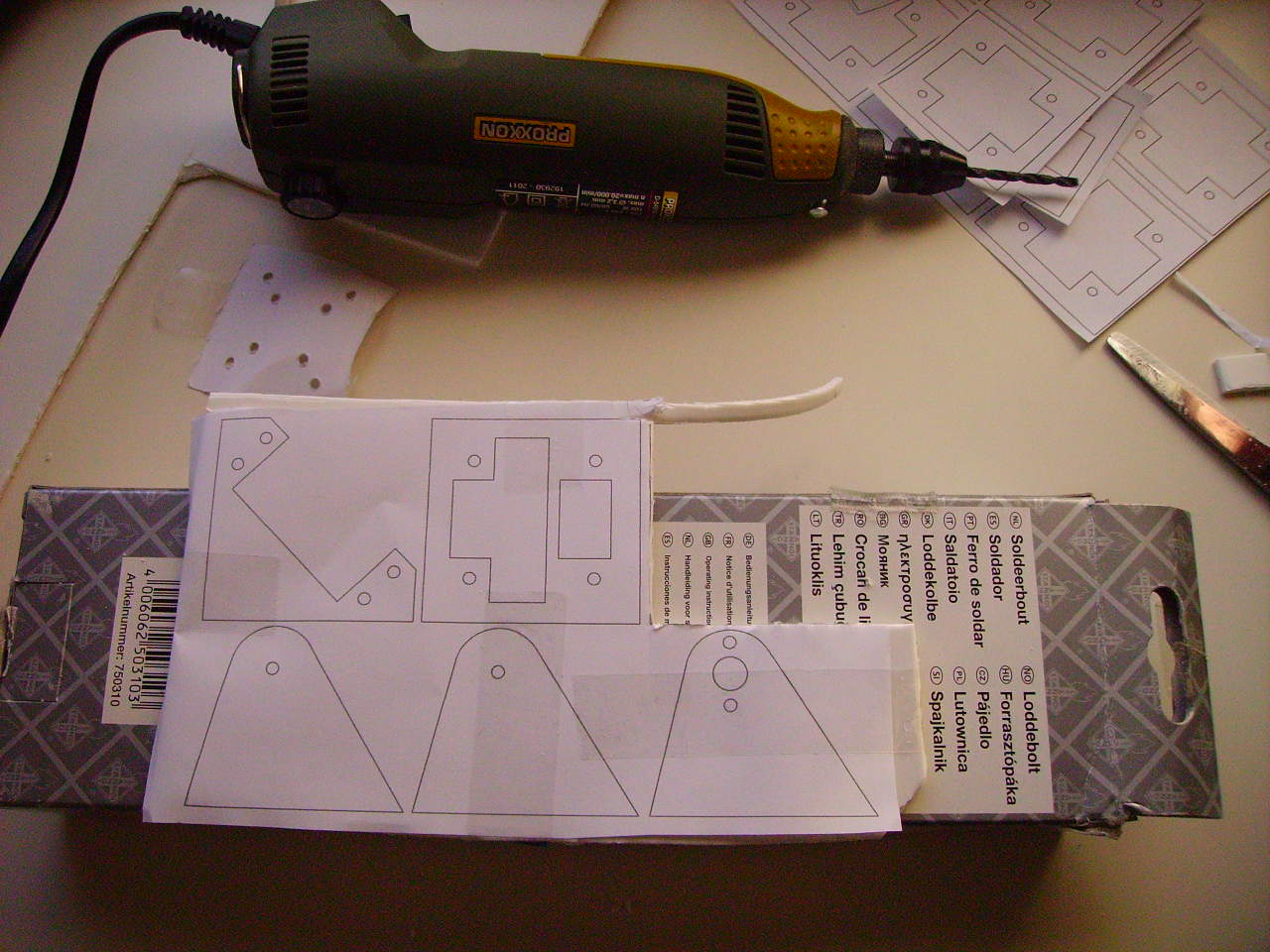
Montaje de un Y1Al no estar disponible actualmente la impresora 3d (Darthmaker) , he hecho los modulos a traves de planos con pvc. Asi ha quedado el Y1:

Lo siguiente ha sido diseñar e imprimir los planos del U1 y R1. El U1 es un nexo de unión entre piezas y no lleva ningún tipo de electrónica ni motor de momento. El R1 es la articulación rotatoria básica.
Los planos han sido colgados en mi cuenta de Thingiverse:
http://www.thingiverse.com/exergy123

R1

U1

Foto de familia
Para finalizar he hecho una prueba con los servos. Dejo el código y el vídeo:
#include
Servo myservo; // crea un objeto tipo servo para controlar el servo
Servo myservo2;
int pos = 0; // variable para almacenar la posición del servo
void setup()
{
myservo.attach(9);
myservo2.attach(11); // liga el servo conectado en el pin 9 al objeto servo
}
void loop()
{
for(pos = 0; pos < 180; pos += 1) // va de 0 a 180 grados
{ // en pasos de 1 grado
myservo.write(pos);
myservo2.write(pos); // dice al servo que se posicione en la posición indicada por la variable 'pos'
delay(30); // espera 15 ms para dar tiempo al servo a llegar a la nueva posición
}
for(pos = 180; pos>=1; pos-=1) // va de 180 a 0 grados
{
myservo.write(pos);
myservo2.write(pos); // dice al servo que se posicione en la posición indicada por la variable 'pos'
delay(30); // espera 15 ms para dar tiempo al servo a llegar a la nueva posición
}
}
El vídeo:
No hay comentarios:
Publicar un comentario